
Silicon-to-Software: Deconstructing BYD’s Quiet Tech Imperium
A definitive technical analysis of BYD's Xuanji E/E architecture, software-defined vehicle stack, AI silicon strategy, and the vertical integration playbook delivering 4.5M vehicles in 2025.

Introduction: Why This Architecture Matters
BYD’s ascent from a battery manufacturer founded in 1995 to the world’s top new-energy vehicle producer by volume is not, at its core, a story about price competition or government subsidies. It is a story about architectural discipline — the kind that takes thirty years of sequential engineering capability-building across batteries, power semiconductors, electric drivetrains, and software-defined platforms, and converts it into a compounding cost and technology advantage that most incumbents find structurally impossible to replicate.
In 2025, BYD delivered 4.5 million vehicles while operating one of the most sophisticated vertical integration systems in automotive history. Its FinDreams subsidiary ecosystem manufactures roughly 75% of key vehicle components in-house — Blade Battery cells, silicon carbide devices, IGBT modules, wiring harnesses, domain controllers, and increasingly its own AI silicon. This is not supply chain management. It is the structural foundation for a cost floor that allows BYD to offer advanced driver assistance systems as standard equipment on vehicles priced below $10,000.
This blog dissects that advantage across its three technical layers: the hardware E/E architecture evolution culminating in Xuanji 4.0; the three-OS software strategy (BYD OS + Android + QNX) bound by a Type-1 hypervisor; and the AI silicon pyramid powering the God’s Eye ADAS system from Horizon J5 silicon all the way up to BYD’s own 4nm Xuanji A3 chip. I benchmark this against Tesla and Xiaomi, trace the data flywheel generating 150 million km of ADAS training data daily, and close with concrete strategic implications for architects and executives.
Chapter 01:
E/E Architecture — Three Generations of Transformation
The Evolutionary Trajectory
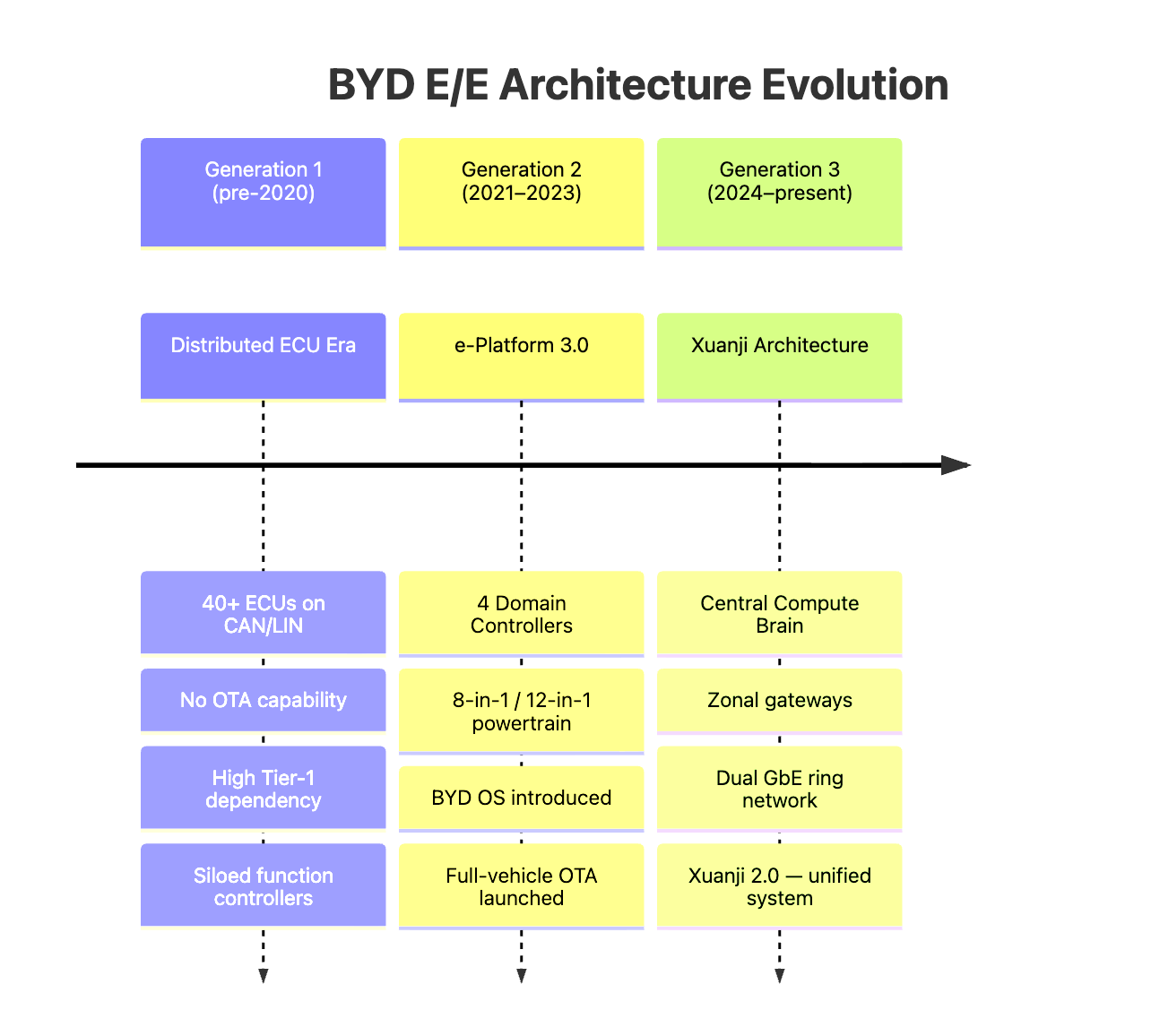
BYD’s electrical and electronic architecture has moved through three architecturally distinct generations. The transitions were not incremental refreshes — each represented a fundamental reorganisation of how software authority is distributed across the vehicle. Understanding the sequence is essential because it explains both where BYD is now and the architectural logic driving its next moves.
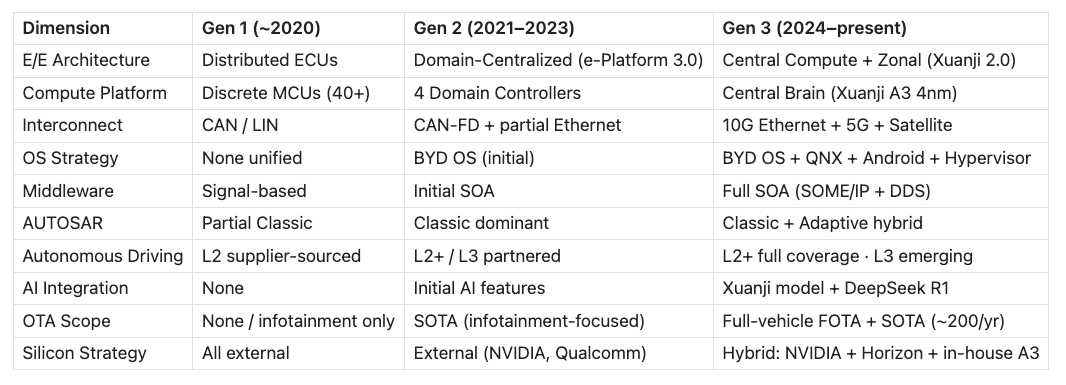
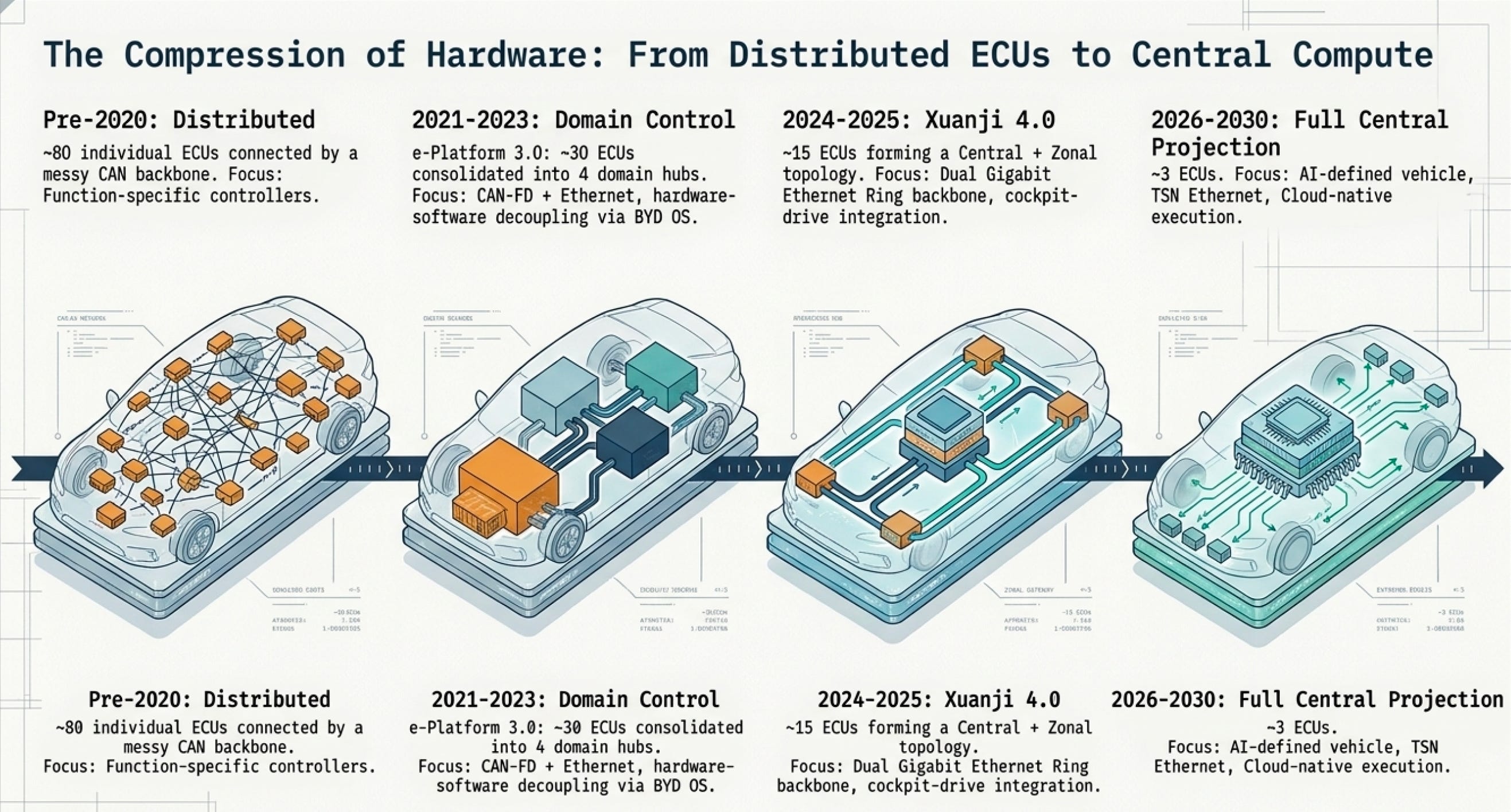
Generation 1 (pre-2020): Distributed ECU Era. Forty or more single-purpose electronic control units communicated over CAN and LIN buses. Each ECU performed one function — a pattern indistinguishable from any legacy ICE OEM of the era. Software was locked to hardware. OTA was essentially absent. BYD’s differentiation lived entirely in battery chemistry and powertrain engineering, not electronics.
Generation 2 (2021–2023): Domain Centralisation via e-Platform 3.0. BYD’s first genuine architectural statement. Four domain controllers (Intelligent Power, Vehicle Control, Cockpit, Driving) replaced the sprawl of distributed ECUs. The landmark “8-in-1” electric drive integration (later “12-in-1”) collapsed motor, reducer, on-board charger, BMS, DC-DC converter, VCU, PDU, and charging port into a single assembly. BYD OS was introduced as a hardware-software decoupling layer, enabling full-vehicle OTA for the first time. The company reported a 50% improvement in system response efficiency. This is the platform that underpins the commercial volume driving everything else in this report.
Generation 3 (2024–present): Xuanji Architecture — Central Compute + Zonal Control. Announced in January 2024, Xuanji formalises the “One Brain, Two Terminals, Three Networks, Four Chains” framework. A central computing platform aggregates intelligence from all domains. Zonal gateways replace local domain controllers. Dual Gigabit Ethernet forms the high-speed backbone. In February 2025, Xuanji 2.0 fused the previously separate cockpit, driving, and propulsion domains into a single integrated system — the most direct signal yet that BYD is converging on full centralisation.
The Xuanji Framework: Decoding “One Brain, Two Terminals, Three Networks, Four Chains”
This formulation is precise architectural language. Each element has a specific meaning and engineering implication.
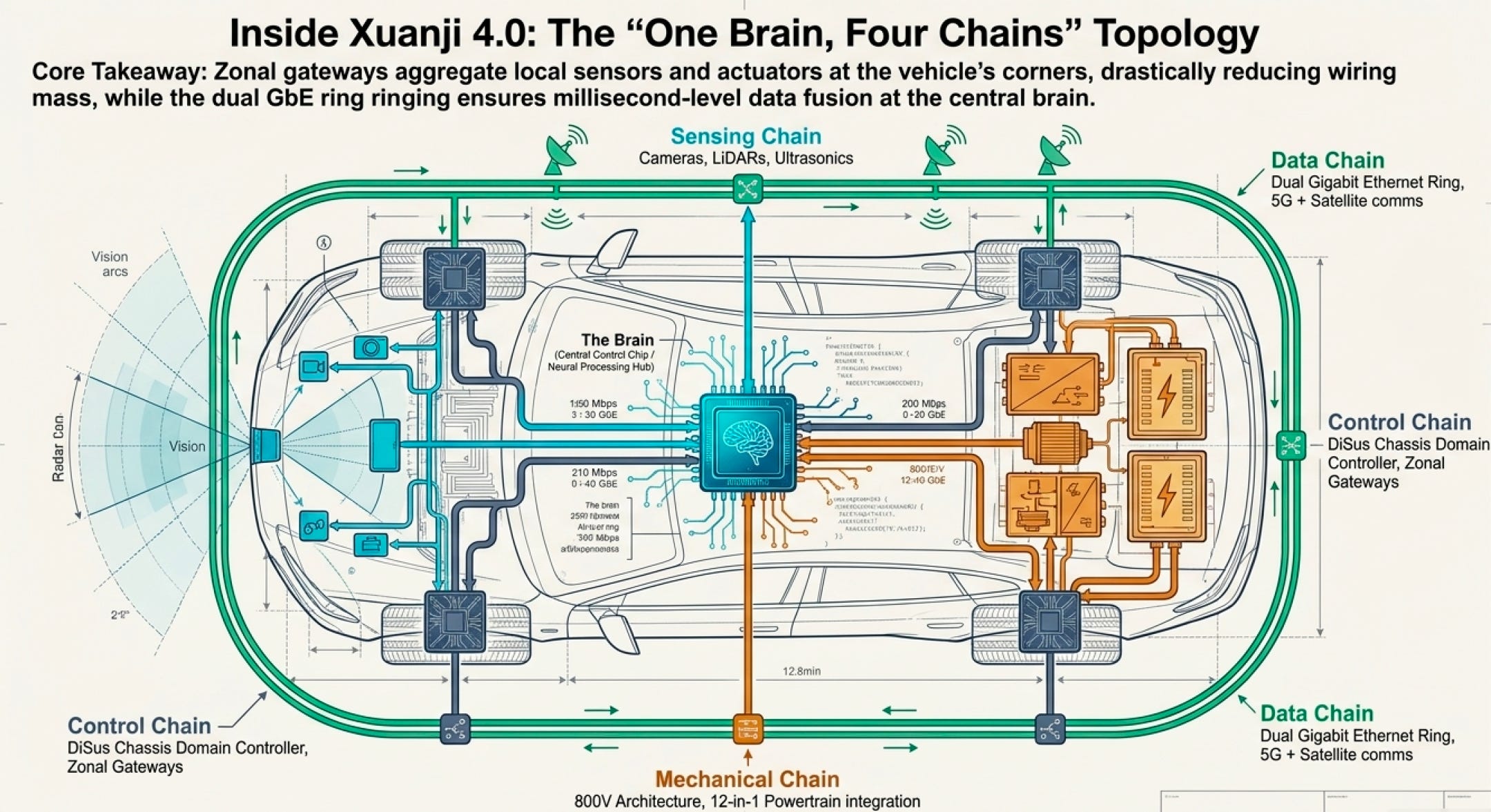
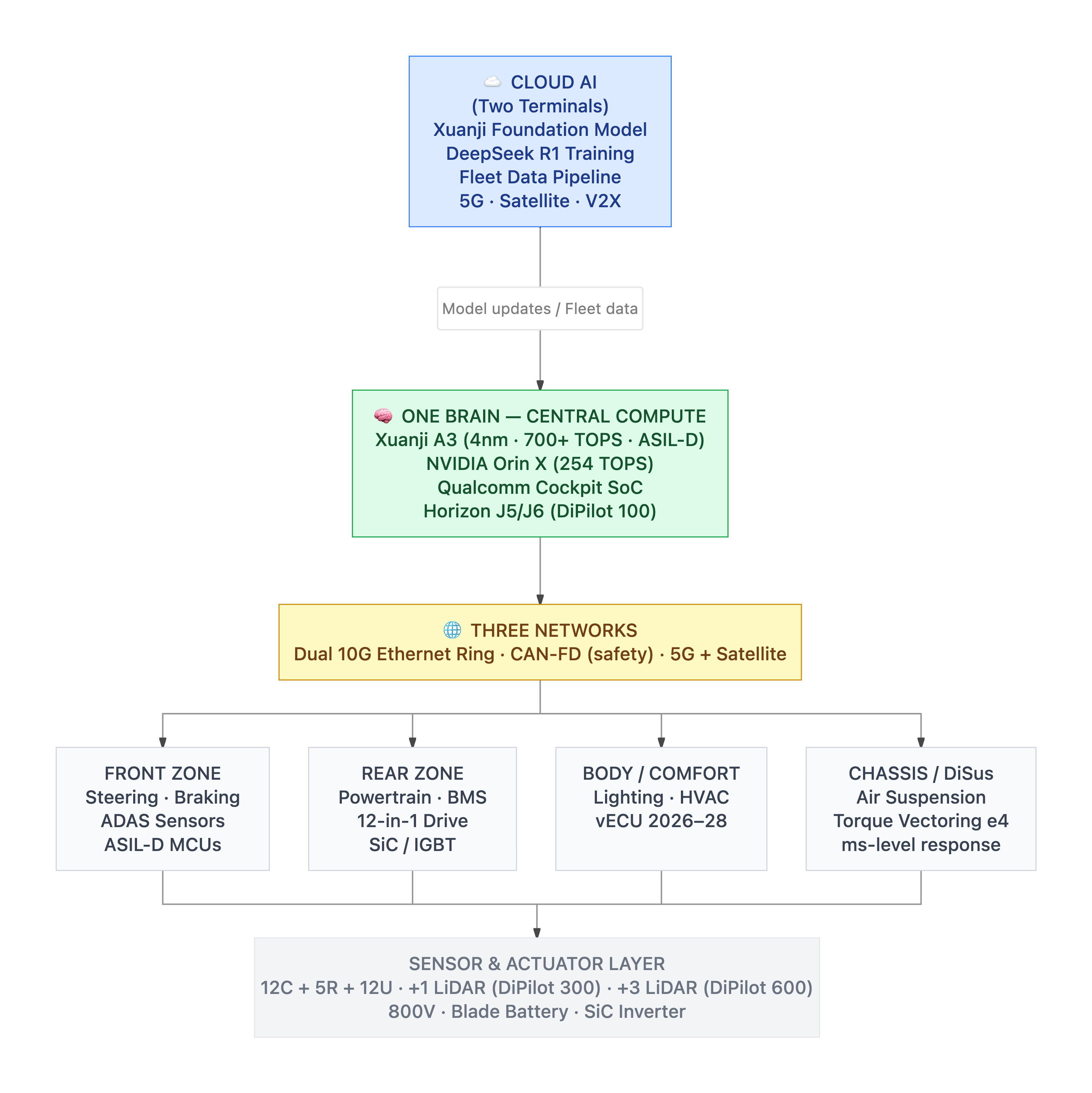
One Brain is the central computing platform — the vehicle’s unified intelligence hub. It hosts the Xuanji A3 SoC (4nm, 700+ TOPS single chip) or, in current production variants, NVIDIA Orin X chips. The brain supports multi-chip configurations through chip decoupling, allowing compute to scale from single-chip to tri-chip arrangements exceeding 2,100 TOPS without architectural redesign. This chip decoupling is strategically significant: it means BYD can upgrade compute performance via silicon swap without changing the vehicle’s software architecture.
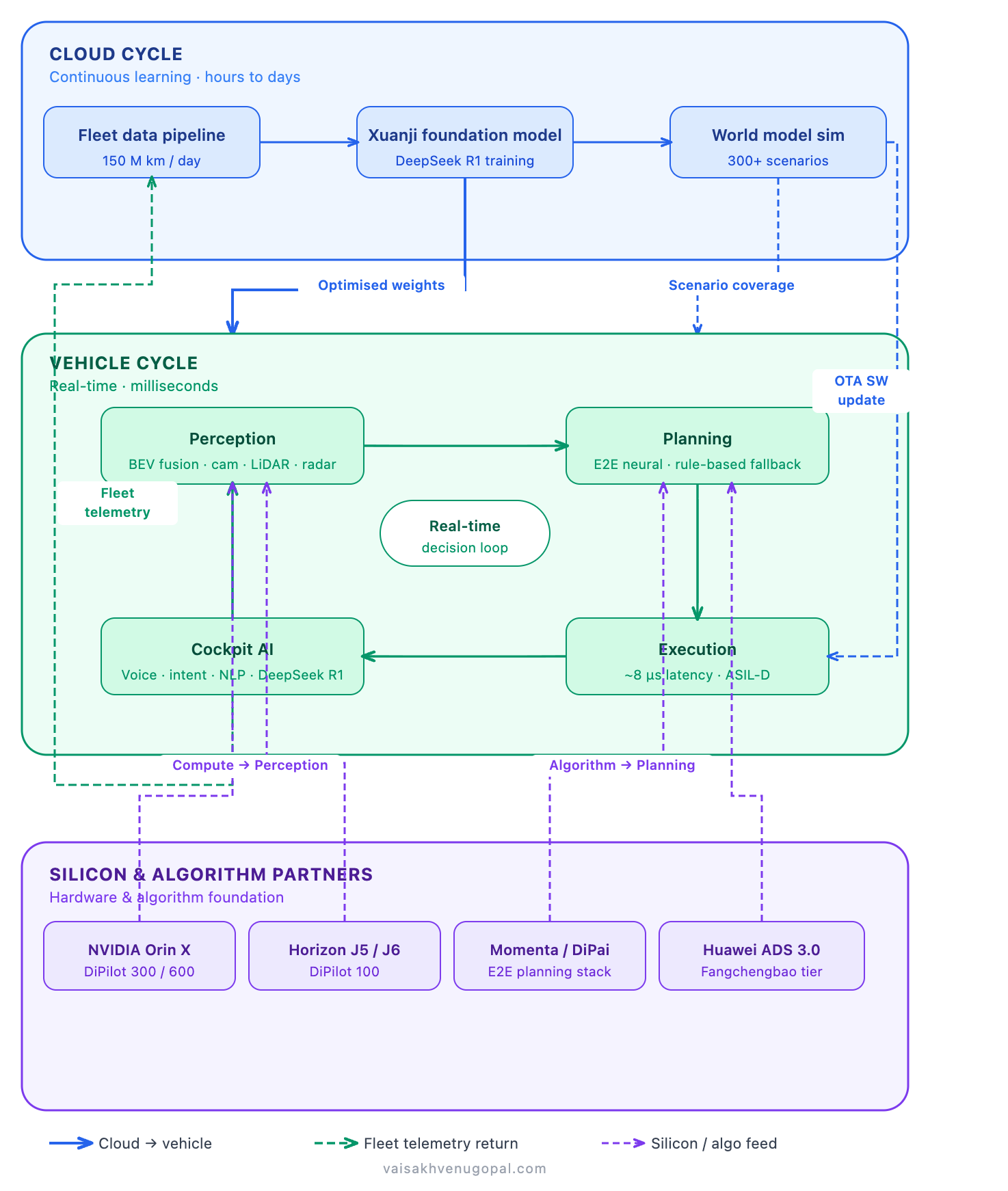
Two Terminals refer to the cloud AI (Xuanji Cloud, running DeepSeek R1 and the Xuanji Foundation Model on 150 million km of daily fleet data) and the vehicle-side AI (the in-car inference engine executing real-time perception and planning at microsecond latency). These are not redundant systems — they are coordinated systems with distinct roles. The cloud cycle runs continuously for model improvement; the vehicle cycle executes at deterministic precision for safety-critical functions. BYD calls this the “dual-cycle” architecture — the industry’s first claimed implementation of a coordinated dual-cycle multi-modal AI model across cloud and vehicle terminals.
Three Networks cover the in-vehicle high-speed Ethernet backbone (dual Gigabit Ethernet ring for ADAS sensor data), 5G cellular connectivity (OTA, telematics, V2X), and satellite communication (off-grid connectivity and OTA redundancy). The satellite layer is notable: it positions BYD vehicles for connectivity independence in coverage-sparse regions and gives the OTA pipeline a backup channel for critical safety updates — first demonstrated on the Yangwang U8 off-road variant.
Four Chains — sensing, control, data, and mechanical — describe the functional domains the central brain orchestrates. Sensing aggregates camera, LiDAR, radar, and ultrasonic inputs. Control issues deterministic commands to braking, steering, powertrain, and chassis actuators. Data manages the pipeline from edge processing to cloud training. Mechanical refers to the physical execution layer: the 12-in-1 electric drive, DiSus chassis system, and 800V power architecture.
In-Vehicle Interconnect: From CAN to 10G Ethernet
The network upgrade from CAN to Ethernet is not cosmetic. A CAN bus operates at 1 Mbps maximum. A camera generating 1080p video at 30fps produces roughly 50 Mbps of raw data. A LiDAR adds another 20–100 Mbps. Run twelve cameras and three LiDARs simultaneously, and you need a backbone that can handle 800 Mbps to 2 Gbps continuously — orders of magnitude beyond CAN’s capacity. BYD’s dual Gigabit Ethernet ring solves this problem, giving the central brain the bandwidth headroom for sensor fusion at full resolution.

FinDreams: The Vertical Integration Engine
No analysis of BYD’s architecture is complete without FinDreams — the internal subsidiary group that functions as BYD’s captive Tier-1 supplier. FinDreams is not a procurement strategy. It is an engineering organisation that designs, manufactures, and iterates on components that traditional OEMs source from external partners at commercial markups — and those markups are exactly the cost gap BYD converts into competitive pricing.
FinDreams Battery is the world’s second-largest EV battery manufacturer and produces the Blade Battery using LFP chemistry in a cell-to-pack format that eliminates module-level overhead, reducing weight and lowering production cost by an estimated 15–20% versus equivalent CATL NCM packs. BYD Semiconductor manufactures IGBT modules at generation 4.0/5.0, SiC power devices, and automotive-grade MCUs. When BYD develops its own ADAS chip — the Xuanji A3 at TSMC’s 4nm node — the decision is not a strategic pivot. It is the next sequential step on a decades-long in-house silicon trajectory that began with phone battery protection circuits in the 1990s.

Chapter 02:
Software Architecture — The Three-OS Hybrid Strategy
Why Three Operating Systems?
The question of OS strategy is, in SDV architecture, a defining one. Tesla decided to run a unified Linux-based OS across all vehicle domains — a clean, opinionated choice that enables tight software control but carries significant safety engineering overhead. Xiaomi’s HyperOS takes Android as its foundation and extends it. BYD made a third choice: a deliberate three-OS architecture where each domain runs the environment best suited to its criticality and performance requirements, bound together by a Type-1 hypervisor.
Understanding why requires understanding what BYD is optimising for. BYD is not optimising for software elegance. It is optimising for the ability to deploy ISO 26262-compliant safety functions and rich Android infotainment on shared silicon, at the lowest possible BOM cost, across millions of vehicles at varying price points. The three-OS architecture, for all its apparent complexity, is the pragmatic answer to that constraint set.
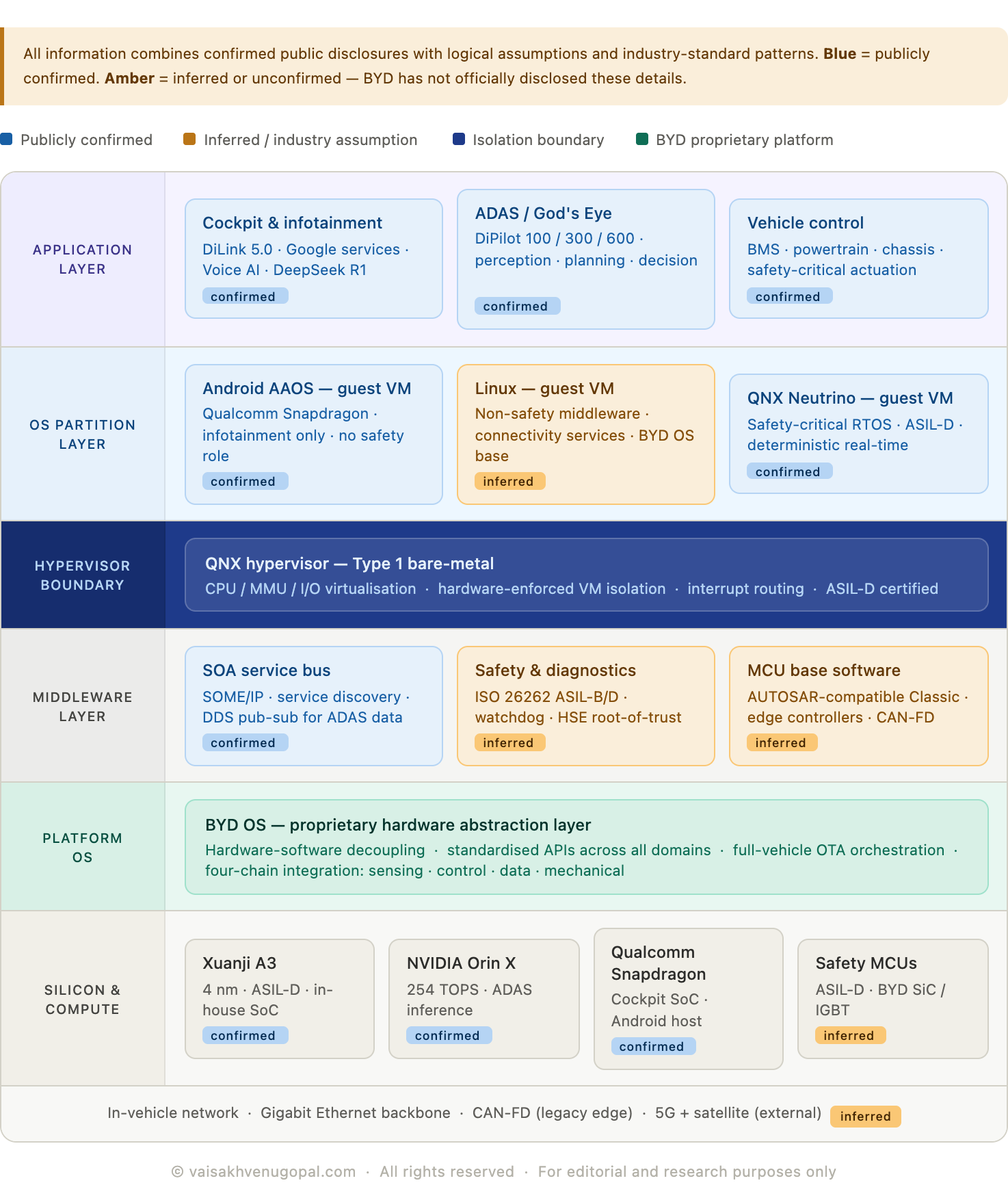
BYD OS (Linux kernel with RT extensions) is best understood as a platform abstraction layer rather than a standalone operating system. Introduced with e-Platform 3.0 in 2021, it decouples application software from specific hardware configurations. A feature developed for the Seal can be OTA-deployed to the Seagull without engineering teams accounting for different underlying hardware — BYD OS abstracts those differences. It is also the mechanism enabling ~200 OTA packages per year: without a platform layer managing firmware dependencies, version compatibility, and rollback orchestration across a heterogeneous fleet, that cadence would be logistically impossible.
Android Automotive OS (AAOS) runs the cockpit domain as DiLink — currently at version 5.0. This gives BYD access to the Google Play developer ecosystem, Google Maps, Google Assistant, and a vast pool of developers who need no automotive-specific training to build for the platform. DiLink carries no functional safety responsibility — it is fully isolated from safety-critical domains. It also serves as the primary surface for AI features: the in-vehicle DeepSeek R1 reasoning interface, voice control backed by cloud LLMs, and AI-enhanced navigation all surface through this Android layer.
QNX OS for Safety handles powertrain control, braking, steering, and ADAS execution. QNX’s microkernel architecture enforces hard memory partitioning between software components — the property that makes it suitable for ASIL-D applications where a missed deadline is a safety violation. QNX also provides BYD’s Type-1 hypervisor, which runs directly on host silicon below all guest operating systems, creating isolated virtual machines for Android (cockpit) and Linux (ADAS compute, BYD OS) while maintaining QNX’s own ASIL-D partition for safety-critical functions.
Hypervisor and Domain Virtualisation
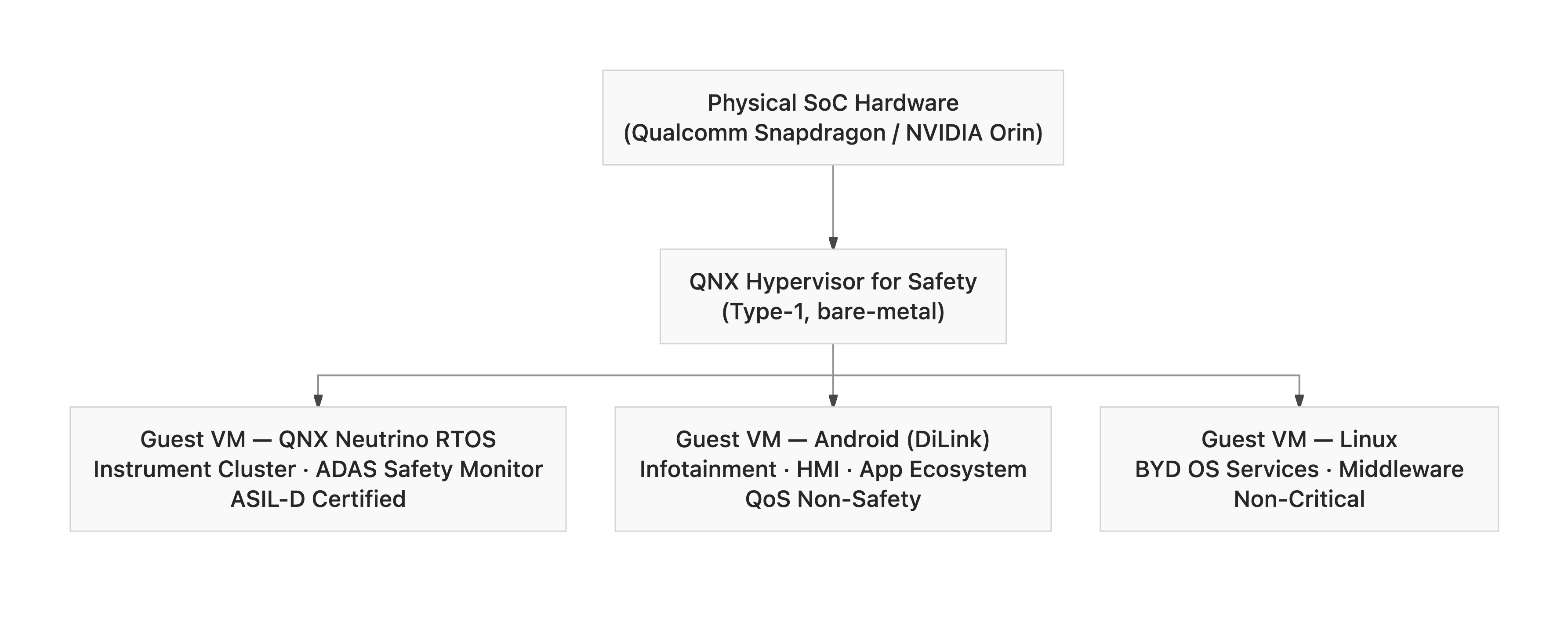
BYD’s current production vehicles consolidate multiple operating environments onto a single SoC — a well-established technique in the automotive industry, enabled by a Type-1 (bare-metal) hypervisor. The approach is not novel in concept; hypervisor-based domain isolation has been standard practice in safety-mixed automotive designs since the early 2010s. What is distinctive about BYD’s implementation is the specific combination of guests it manages and the safety boundaries it enforces.
On cockpit-domain SoCs (Qualcomm Snapdragon), the QNX Hypervisor for Safety runs directly on the silicon and hosts two isolated guest environments: Android (DiLink) for the infotainment partition and QNX Neutrino RTOS for the instrument cluster and safety telltales. The hypervisor enforces separation at the hardware level — CPU core affinity, MMU memory isolation, device ownership, I/O virtualisation, and interrupt routing are all managed by the hypervisor, ensuring that a crash or memory leak in the Android guest cannot compromise the QNX safety partition. This is the mechanism that allows BYD to meet ISO 26262 ASIL-D requirements for instrument cluster functions while running a resource-hungry Android stack on the same die.
On ADAS-domain hardware (NVIDIA Orin for DiPilot 300/600), a similar partitioning pattern applies: safety-critical perception and chassis coordination run in a hardened partition, while data logging, model inference experimentation, and connectivity services occupy separate, lower-criticality partitions. The key safety guarantee is that no guest can directly address another guest's memory or preempt a safety-critical interrupt — properties verified through the QNX Hypervisor's ASIL-D tool qualification.
AUTOSAR, SOA, and Standards Posture
BYD’s relationship with industry standards is pragmatic and selective. The company has not publicly committed to comprehensive AUTOSAR Adaptive adoption, and public evidence for specific standards membership (e.g., SOAFEE) is limited and contested across sources. What can be stated with reasonable confidence is the following.
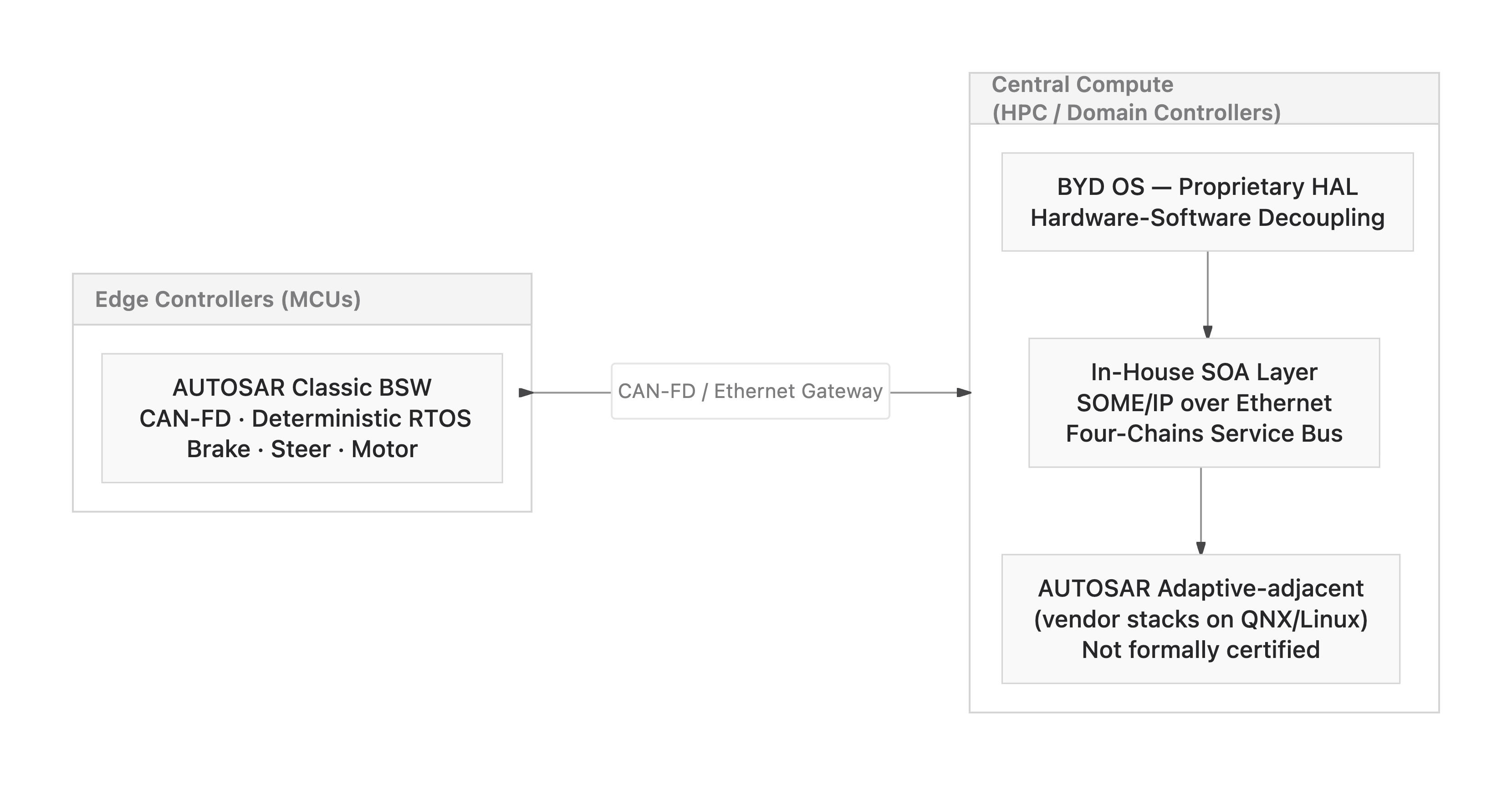
AUTOSAR Classic is almost certainly present in BYD’s powertrain and chassis MCUs. These controllers — handling braking, steering, and motor actuation — use RTOS-style stacks with signal-based communication over CAN-FD, which is precisely the use case AUTOSAR Classic was designed for. BYD’s FinDreams-supplied domain controllers follow patterns common to Chinese Tier-1 suppliers, who routinely deploy Classic Platform BSW on Infineon AURIX or equivalent safety MCUs.
Above the MCU layer, BYD’s middleware is primarily proprietary. BYD OS — introduced with e-Platform 3.0 in 2021 — provides a hardware-abstraction layer across the four domain controllers, exposing standardised internal APIs for the “Four Chains” (sensing, control, data, mechanical). Communication between high-performance domains uses SOME/IP over Ethernet (potentially) as a service transport protocol, consistent with SOA principles but implemented within BYD’s own service registry rather than a standards body framework.
AUTOSAR Adaptive adoption at the HPC level is plausible but not publicly confirmed. Sources diverge: some analyses infer Adaptive-compatible middleware from the presence of QNX and POSIX environments on Orin-class hardware (where suppliers like Elektrobit routinely supply Adaptive stacks); other sources characterise BYD as preferring in-house service layers. The most defensible position is that BYD applies Adaptive-adjacent patterns — POSIX services, dynamic deployment, SOME/IP — without formally branding or certifying against the Adaptive Platform specification.
SOAFEE participation has been cited by some sources and contradicted by others. No official BYD announcement of SOAFEE membership or pilot programme has been publicly verified.
In summary, there is no clear confirmation about BYD directly using AUTOSAR CP or AP. Also, not been actively part of SOFEE or Eclipse SDV.
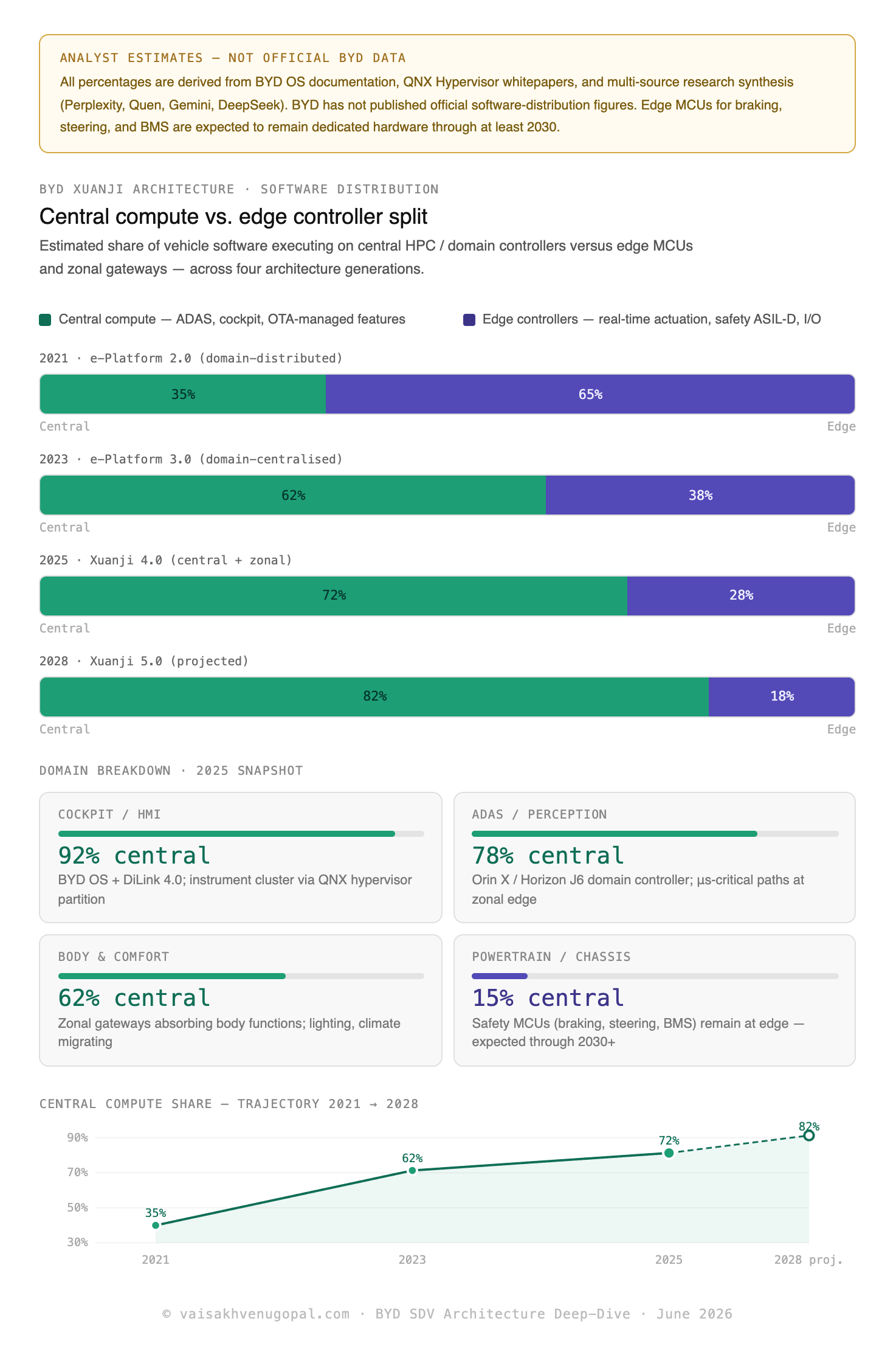
Central Compute vs. Edge Controller Split
A question that preoccupies most SDV architects: what percentage of a vehicle’s software should run on central compute versus distributed safety-grade MCUs? BYD’s current split — estimated at ~55% central, ~45% edge in 2025 vehicles — reflects the transitional architecture. By 2028, as the vECU migration programme progresses, BYD projects the split reaching approximately 80% central. Safety-critical real-time functions will never fully migrate from dedicated MCUs.
Chapter 03:
ADAS & AI — God’s Eye, Xuanji, and the 150M km Flywheel
The Strategic Context
BYD’s intelligent driving programme entered 2024 in a position most analysts had underestimated. The company had been publicly criticised for years — including by its own Chairman Wang Chuanfu, who called its software capability “far behind” competitors as recently as 2023. What those critiques missed was the scale of the internal restructuring underway: the merger of the Tianxuan and Tianlang ADAS departments in late 2024, the hiring of Zhou Peng (formerly Baidu) to lead end-to-end large model development in June 2024, the deployment of RMB 1 billion per month in intelligent driving engineering payroll, and the single February 2025 announcement making God’s Eye standard on 21 models.
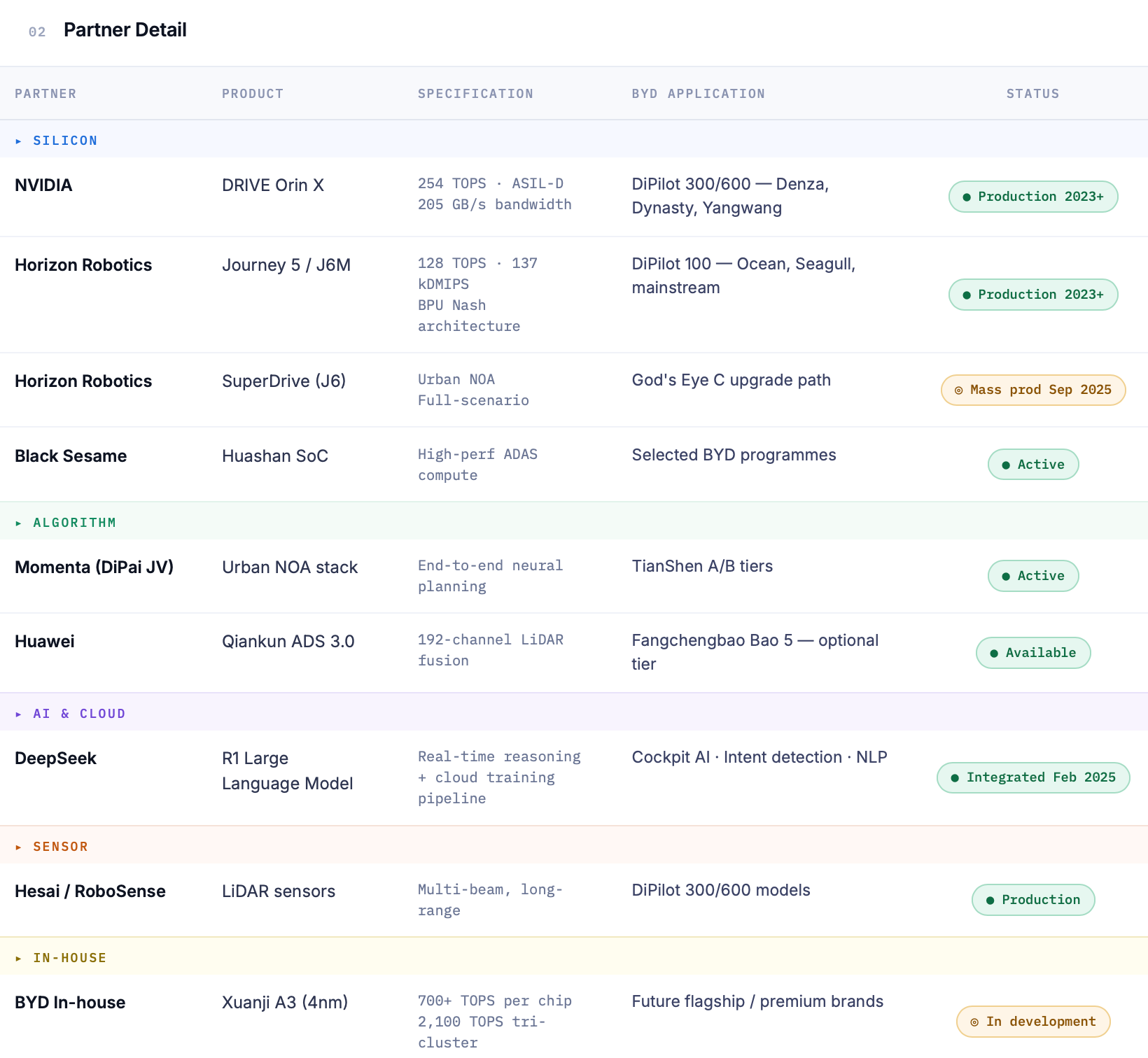
Understanding BYD’s ADAS strategy requires separating it into three layers: silicon (which chips provide compute, at what cost), algorithm (what software runs on those chips, and who wrote it), and data (how training data is collected, processed, and fed back to improve the system). Each layer has its own partnerships and competitive dynamics.
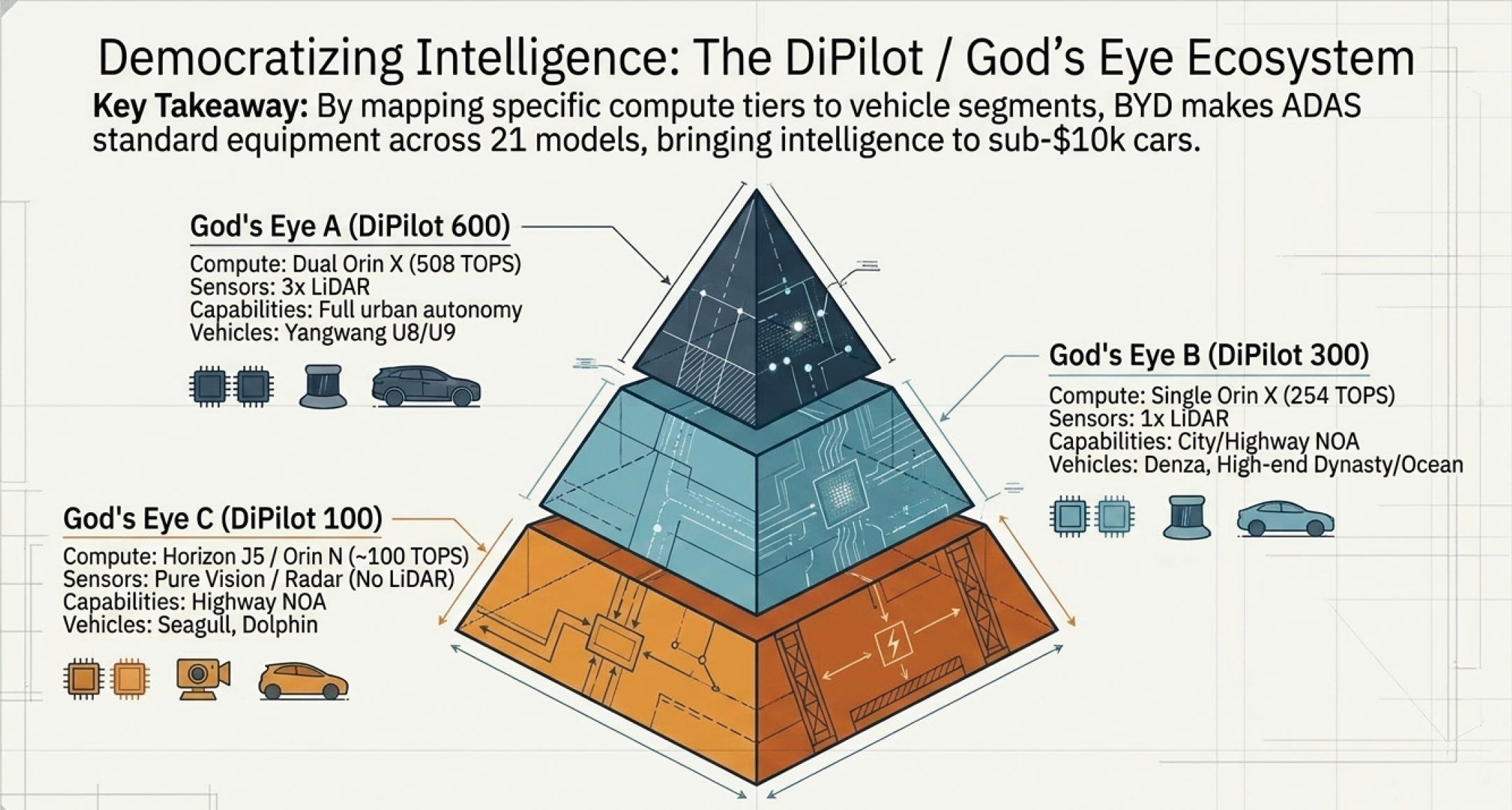
The God’s Eye Silicon Pyramid
BYD’s ADAS compute is structured as a three-tier pyramid mapping to vehicle price segments. This is not a product lineup decision — it is an architectural expression of cost-optimisation philosophy. Rather than specifying a single high-performance platform for all vehicles (Tesla’s approach), BYD right-sizes silicon to use case and price point while maintaining a common software framework across tiers.
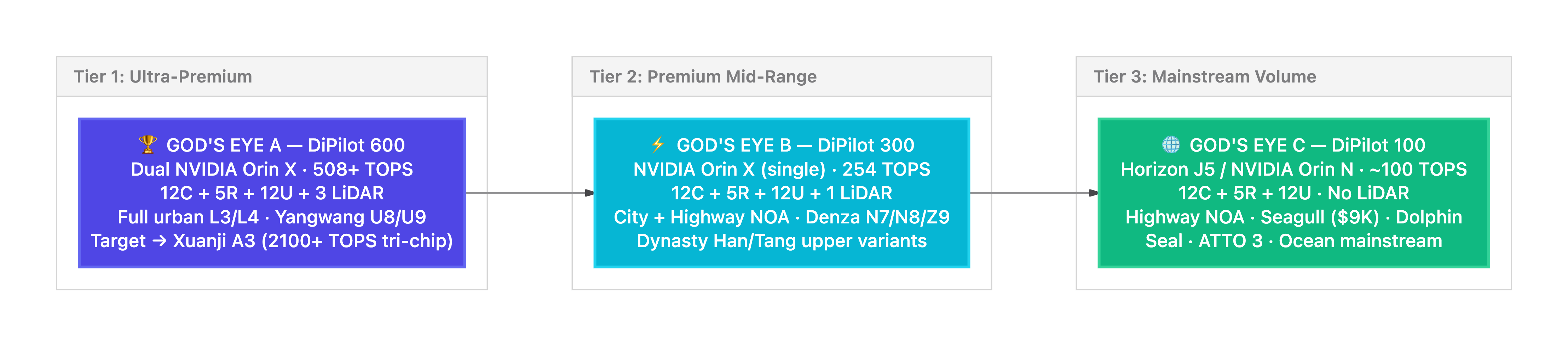
The Xuanji A3 chip deserves special attention. Fabricated at TSMC’s 4nm node, the A3 delivers 700+ TOPS from a single chip — roughly 2.7× the TOPS of a single NVIDIA Orin X. In a tri-chip configuration, the A3 exceeds 2,100 TOPS. The key economic implication: BYD’s cost for tri-chip A3 compute is estimated at approximately one-third the cost of an equivalent NVIDIA Thor solution. This is the mechanism that makes “flagship ADAS economics on mainstream vehicles” architecturally achievable, not just marketable.
Caption: BYD Xuanji A3 — 4nm process node (TSMC), 700+ TOPS single chip, 16-core CPU, 3-core NPU optimised for Transformer architectures, ASIL-D certified. Tri-chip configuration exceeds 2,100 TOPS at approximately one-third the cost of the NVIDIA Thor equivalent.
The Algorithm Layer: In-House, Partnered, and the DiPai JV
BYD’s ADAS algorithm development is housed within the New Automotive Technology Research Institute — one of the largest ADAS engineering concentrations at any single OEM globally, with over 5,000 engineers, including a dedicated core algorithm group.
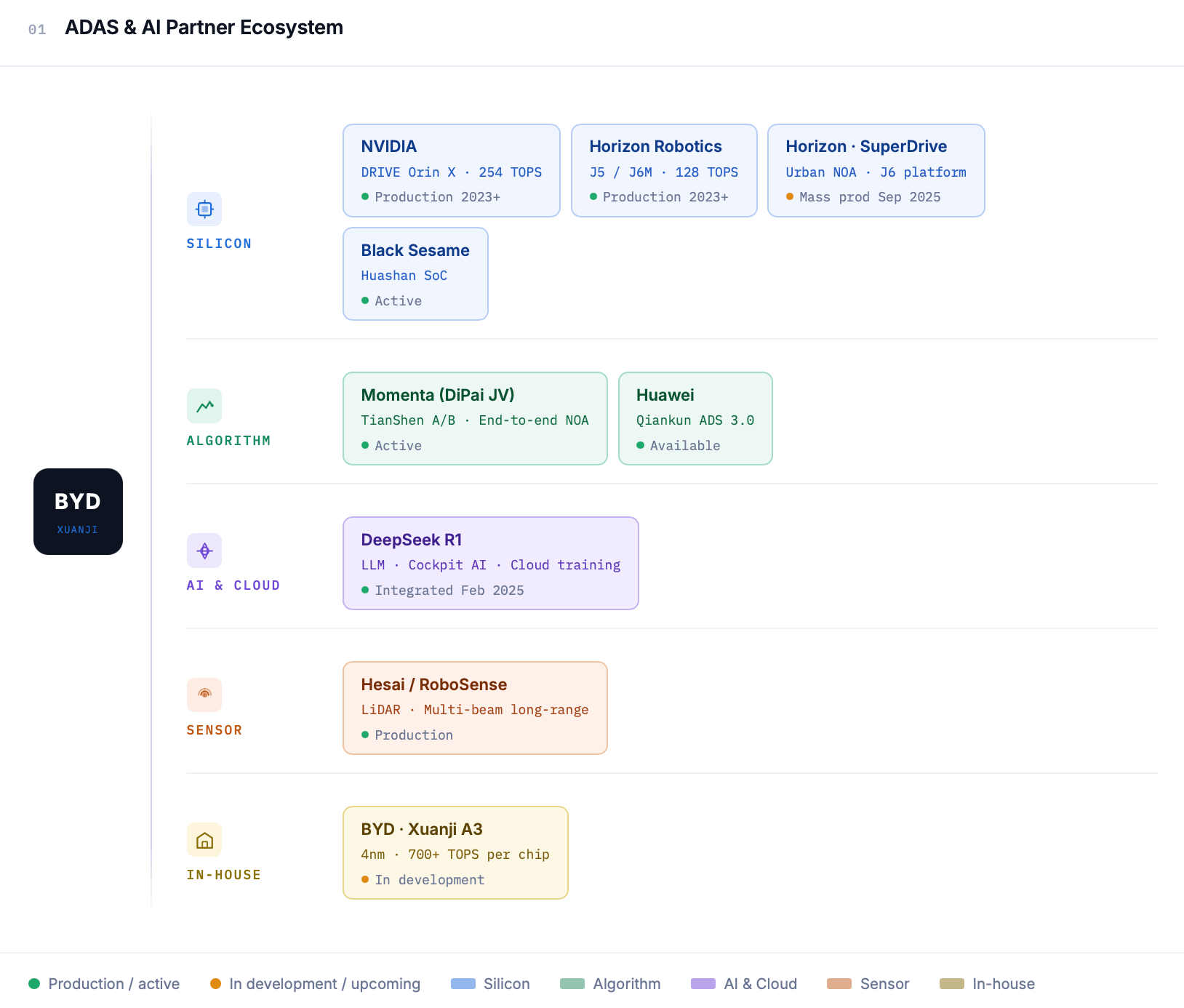
The algorithm stack is a deliberate hybrid of in-house development and strategic partnerships. BYD’s engineers build the Bird’s Eye View (BEV) perception algorithm — a multi-camera fusion approach constructing a top-down environmental model without requiring LiDAR — and retain the resulting IP. For urban NOA, BYD has partnered with Momenta through the DiPai JV, co-developing the TianShen A and B algorithm tiers. Horizon Robotics provides its SuperDrive full-scenario urban NOA solution for the DiPilot 100 God’s Eye C tier, targeting mass production in September 2025. On the Fangchengbao Bao 5, BYD offers customers a choice between TianShen C (in-house) and Huawei’s Qiankun ADS 3.0 — a pragmatic acknowledgement that best-in-class external capability can serve as a differentiator even without in-house ownership.
The most significant 2025 development: DeepSeek R1 integration, announced February 2025. DeepSeek R1 operates at two levels simultaneously — cloud-level (accelerating the ADAS training pipeline) and vehicle-level (powering cockpit AI reasoning: natural language understanding, implicit intent detection, contextual personalisation). This is not a cosmetic integration — it fundamentally changes what BYD’s vehicles can do with ambiguous voice commands and contextual inference about driver preferences.
The Xuanji AI Dual-Cycle Architecture
What BYD calls “the industry’s first dual-cycle multi-modal AI model” refers to the coordination between the cloud cycle (continuous learning from 150 million km of daily fleet data) and the vehicle cycle (real-time execution at ~8 microsecond decision latency). These are not the same model running in two places — they are two coordinated systems with distinct roles and timescales.
The Data Flywheel: BYD’s Most Durable Advantage
BYD’s fleet of 4.27 million active vehicles generates approximately 150 million km of ADAS training data per day. This figure is not a performance metric — it is a compounding structural advantage. Algorithm iteration efficiency is claimed at 3× the industry average, meaning BYD’s engineers can test and validate a model change against real-world scenarios at three times the speed of a competitor with a smaller fleet. DeepSeek R1 integration accelerates the cloud training pipeline further. Every quarter, the data gap between BYD and smaller fleet competitors grows larger, not smaller.
The fleet data flywheel is arguably BYD’s most durable competitive advantage in autonomous driving — not its silicon partnerships, not its algorithm team size, but the 150 million km of real-world training data generated daily by 4.27 million vehicles.
Chapter 04:
OTA & Connectivity — 200 Updates Per Year at Fleet Scale
Why OTA Cadence Is a Competitive Weapon
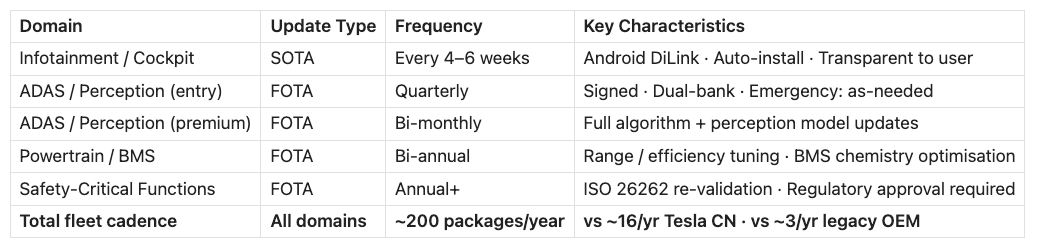
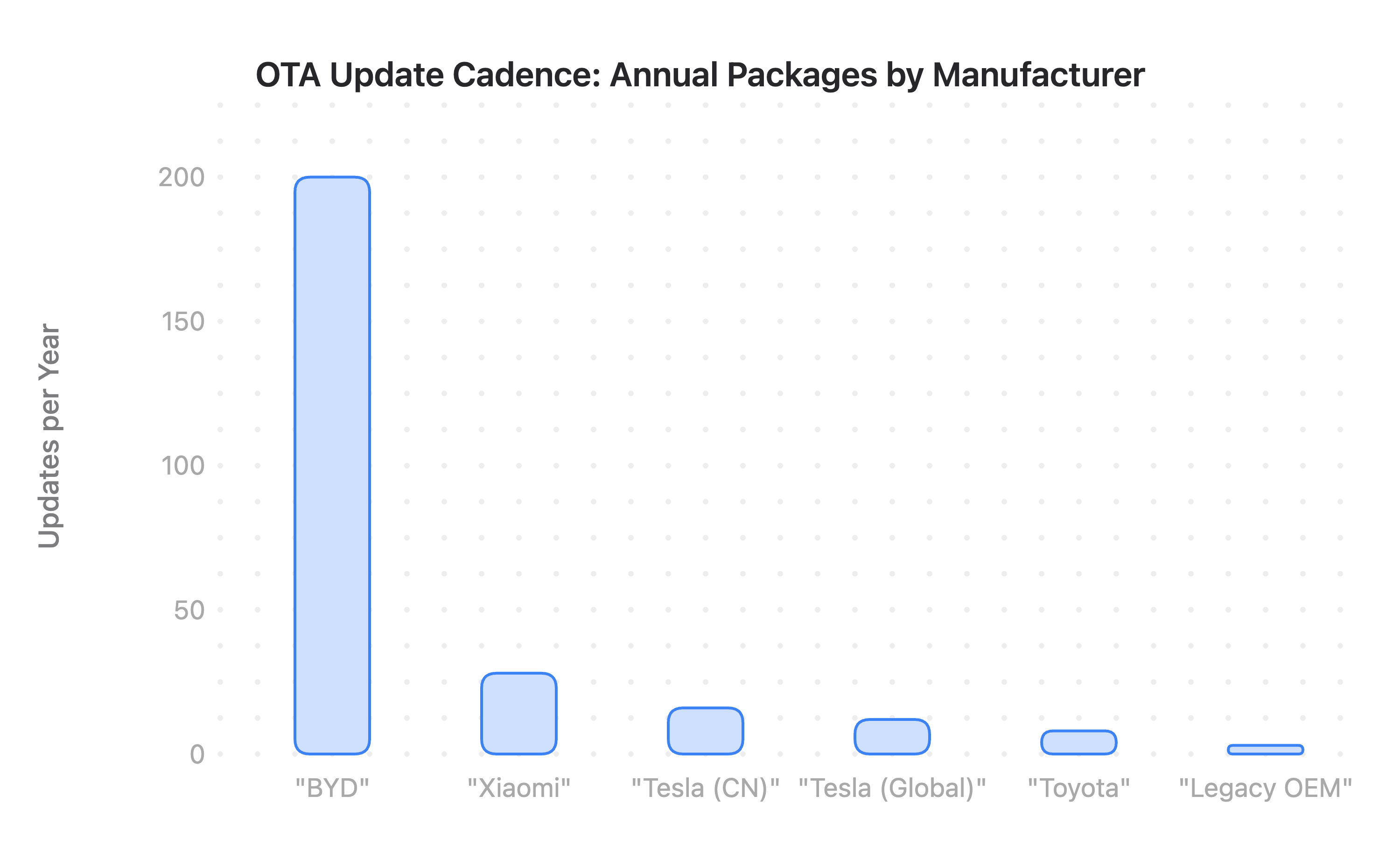
Over-the-air update capability is often described as a feature. At BYD’s scale, it is something more structural: the mechanism by which software investment translates into customer-facing value, product deficiencies are corrected before they reach dealerships, and the data flywheel generates feedback loops compressing development cycles. When BYD deploys approximately 200 OTA software packages per year across 4.27 million vehicles spanning dozens of model variants, the engineering challenge is comparable to running a major consumer software platform — except that a failed deployment cannot simply be rolled back with a server-side flag; it must be safely reversed on a safety-critical embedded system in a vehicle that may be mid-journey.
The OTA Technical Architecture
Dual-Bank (A/B) Flash Partitioning is the foundational reliability mechanism. Every vehicle module with OTA capability maintains two firmware banks: Bank A (currently executing) and Bank B (target for the incoming update). When an update is triggered, the system downloads new firmware into Bank B while Bank A continues running without interruption. Once download and cryptographic verification are complete, the bootloader switches the active partition on the next scheduled reboot. If Bank B firmware fails health checks during a post-update validation period, the system automatically reverts to Bank A — a rollback mechanism that makes OTA deployments safe even for powertrain-adjacent domains.
Delta Compression is what makes 200 packages per year economically viable. Rather than transmitting complete firmware images (which for a modern ADAS domain controller can exceed 2 GB), BYD’s OTA infrastructure transmits only the binary differences between current and target firmware versions. This reduces average package size by 70–90%, cutting cellular data costs and enabling updates that would otherwise require hours to complete in minutes. It also makes incremental releases practical: BYD can push a 0.0.1-version sensor calibration fix without bundling it into a full release cycle.
Security Orchestration provides the third pillar. Each vehicle has a unique cryptographic identity provisioned at manufacture. Firmware packages are signed with BYD’s private key before distribution, and the vehicle verifies the signature against a hardware-stored public key in a Hardware Security Module before permitting installation. BYD maintains a revocation mechanism for outdated firmware to prevent rollback attacks exploiting known vulnerabilities. Cloud infrastructure runs on Alibaba Cloud and Huawei enterprise solutions, providing the scale to serve the full fleet simultaneously.

OTA Cadence by Domain
Different vehicle domains have fundamentally different update economics. Infotainment can absorb rapid changes without safety validation overhead. Safety-critical domains require formal re-qualification cycles that constrain cadence regardless of engineering ambition.
Ground-Up Connectivity: The Xuanji Three-Network Stack
BYD’s vehicles are designed as connected from the architecture level, not as vehicles with a connectivity module bolted on. The Xuanji Three Networks (in-vehicle Ethernet, 5G, satellite) are first-class architectural elements, not optional features. The TCU maintains constant communication with BYD’s cloud for real-time diagnostics, OTA management, connected services, and fleet data aggregation.
C-V2X integration enables cooperative adaptive cruise control, intersection collision warning, and emergency vehicle preemption — positioning BYD’s vehicles to leverage China’s expanding roadside RSU infrastructure for perception beyond onboard sensors. As cities deploy more RSU infrastructure, vehicles with C-V2X capability benefit from an expanding sensor network they did not pay for.
Chapter 05:
Vehicle Portfolio — Architecture Across the Brands
How One Architecture Serves $9k to $150k Vehicles
One of the most strategically significant aspects of BYD’s architecture is how it scales across a portfolio spanning from a $9,000 city car to a $150,000 performance SUV. This is achieved not by developing independent architectures for each price segment — it is achieved by designing a scalable platform in which the software framework is common and the hardware configuration is tiered. This is architecturally analogous to how a cloud platform scales across workloads by adjusting the compute tier while keeping the software stack constant.
The Dynasty and Ocean series — BYD’s highest-volume brands in the RMB 80,000–200,000 ($11,000–$28,000) segment — form the commercial heart of the operation and the data flywheel that makes everything else possible. Tens of thousands are delivered daily, each generating ADAS training data that feeds the cloud training pipeline. The Seagull, at under $9,000, is the most aggressive expression of this strategy: God’s Eye C ADAS on Horizon J6M silicon, standard, at a price point where no other manufacturer offers any comparable intelligence capability.
Yangwang — BYD’s ultra-luxury brand — represents the architectural frontier. The U8 SUV and U9 supercar deploy the e4 Platform (quad-motor independent drive), DiPilot 600 with dual NVIDIA Orin X and triple LiDAR, and DiSus-P/X active suspension enabling tank-turn manoeuvres. These are the vehicles in which the Xuanji A3 chip will debut in production.
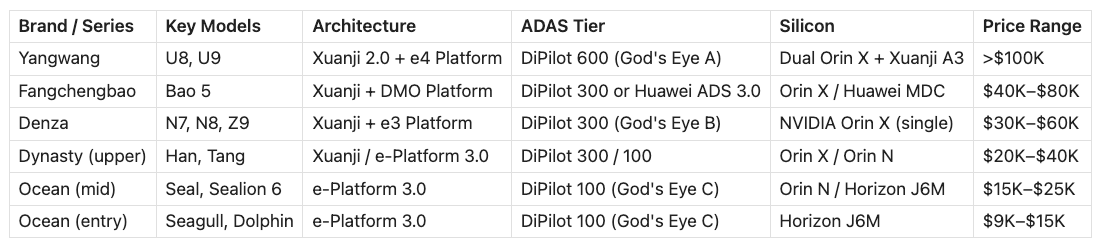
February 2025 milestone: BYD announced God’s Eye ADAS as standard across 21 of 30 models spanning 4 brands — including the $9,000 Seagull. This made BYD the first automaker globally to offer full highway NOA as standard on a sub-$10,000 vehicle. Target: 40–50% of 2025 sales volume (approximately 2–2.5 million units) equipped with intelligent driving.
Chapter 06:
Benchmarks — BYD vs Tesla vs Xiaomi
The SDV Litmus Test
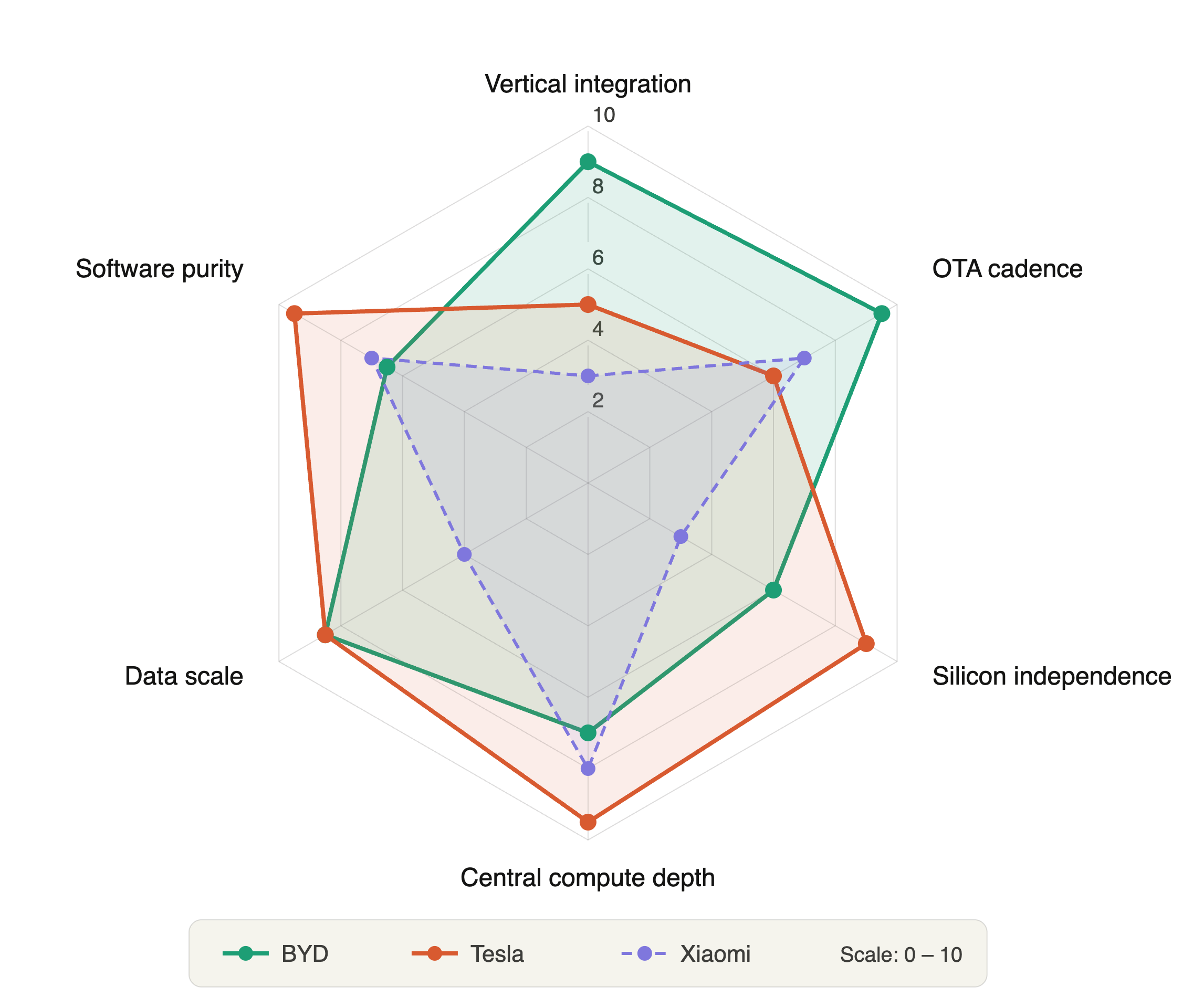
How truly software-defined is BYD? This is not a binary question — “software-defined” is a spectrum, and BYD’s posture differs from Tesla’s and Xiaomi’s in ways reflecting genuinely different strategic choices rather than gaps in capability.
Tesla set the SDV benchmark. Its quasi-centralised HW4.0 architecture, unified Linux OS, fully in-house FSD algorithm, own AI silicon (AI4/AI5), and China OTA cadence of ~16 significant packages per year represent the deepest software-only philosophy in automotive. Tesla’s strength is software purity and control. Its constraint is volume: 2.5× fewer vehicles means a smaller data flywheel.
Xiaomi SU7 (launched 2024) is the cleanest-sheet zonal architecture in production — a single Integrated Central Processor (Snapdragon 8295) connected to three zonal controllers, running HyperOS. Elegant architecture, early data advantage, but no vertical integration depth and a fleet data pool orders of magnitude smaller than BYD’s.
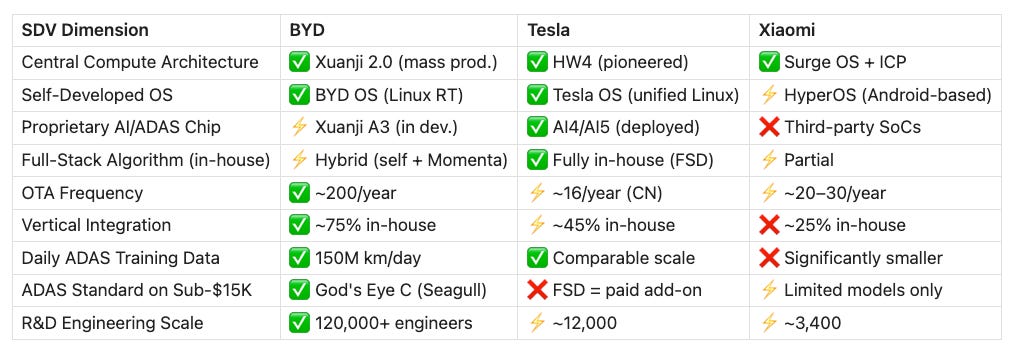
BYD sits between these poles. It exceeds Tesla on vertical integration (75% vs ~45% in-house) and fleet data scale. It significantly exceeds both on OTA cadence. Where it trails Tesla: software architecture purity (three-OS hybrid vs unified Linux) and full-stack algorithm ownership (hybrid partnerships vs fully in-house FSD). The practical implication: BYD’s architecture is better optimised for cost and scale; Tesla’s for software authority and iteration depth.
SDV Dimension-by-Dimension Assessment
OTA Cadence Comparison
Chapter 07:
The Triple-Moat Differentiation Playbook
How BYD Wins: Three Interlocking Moats
BYD’s competitive architecture is built on three interlocking moats — cost, velocity, and data — that form a self-reinforcing flywheel. Each moat strengthens the others: lower costs expand the fleet; a larger fleet generates more data; better data improves the product; a better product commands higher volumes and margins. Understanding this system is essential for any organisation attempting to compete with or respond to BYD’s global expansion.
Moat 1 — Cost: Vertical Integration Chain
From lithium mine to Blade Battery to IGBT/SiC/Xuanji A3 to completed vehicle: 75% parts self-manufactured, eliminating supplier margins at every layer. The Xuanji A3 costs approximately one-third of NVIDIA Thor. BOM cost runs ~20–25% below traditional OEM baselines for core components. This is not a cost programme — it is a structural cost architecture built over thirty years. The result: highway NOA as standard on a $9,000 vehicle, which no competitor — traditional OEM or EV startup — has come close to matching.
Moat 2 — Velocity: Full-Stack Iteration Control
A closed-loop ecosystem — self-developed chip to OS to algorithm to data — means OTA updates require no third-party supplier coordination. New model from concept to production: 12–18 months versus industry average 36–48 months. Approximately 200 OTA packages per year — 12× Tesla China, 25× Toyota. BYD claims software iteration efficiency at 3× the industry average. This velocity comes from architectural ownership: when you control the chip, the OS, the algorithm, and the fleet data pipeline, the feedback loop closes at a fundamentally faster rate than when you depend on external vendors at each layer.
Moat 3 — Data: The 150M km/day Flywheel
4.27 million vehicles generate 150 million km of ADAS training data daily. DeepSeek R1 integration accelerates cloud training. The flywheel compounds continuously: every quarter, BYD’s data advantage over smaller fleet competitors grows larger, not smaller. Latecomers face a widening gap, not a static one. This is the moat that is most difficult to contest without either massive fleet scale (which takes years to build) or a synthetic data strategy capable of substituting for real-world scenario diversity.
BYD does not win on any single technology. It wins because it controls the entire value chain from lithium extraction to software deployment — and uses that control to compress cost, accelerate iteration, and compound data advantage simultaneously.
Chapter 08:
Architecture Evolution Matrix
How BYD’s Stack Has Changed Across Generations
Chapter 09:
Strategic Implications
For The Architects
BYD’s Xuanji platform demonstrates that a three-OS hybrid with a Type-1 hypervisor is viable at mass production scale. QNX + Android + Linux on shared SoC silicon — with AUTOSAR Classic at the safety edge and Adaptive AUTOSAR emerging in the central domain — is the pragmatic architectural path for any OEM balancing ISO 26262 compliance with rich software experience. The vECU migration strategy (body/comfort 2026, powertrain auxiliary 2028) offers a concrete sequencing model that manages certification risk while progressing toward centralisation.
Do not conflate OTA frequency with software quality. BYD’s 200 packages per year works because of delta compression, staged rollout, and dual-bank flash — not despite safety standards. The security and reliability infrastructure enabling that cadence is as sophisticated as the update frequency it enables.
The interconnect lesson is also worth absorbing: the move from CAN to 10G Ethernet is not a luxury upgrade for premium vehicles. It is an architectural prerequisite for any ADAS system running more than two or three cameras simultaneously. If your platform architecture still relies on CAN as its primary sensor backbone, the sensor fusion capability you can offer is fundamentally constrained — regardless of how capable your central compute silicon is.
For The Technology Leaders
BYD’s silicon strategy reveals the strategic value of chip design capability even without fab ownership. The Xuanji A3 (TSMC 4nm, BYD-designed) delivers competitive TOPS at approximately one-third the cost of equivalent external solutions because hardware-software co-design removes the third-party vendor markup and allows the chip’s architecture to be optimised specifically for BYD’s software workloads. If your SDV platform has a long-term dependency on NVIDIA or Qualcomm for all compute, evaluate whether that dependency represents a strategic cost bottleneck — particularly as those vendors serve many competing customers simultaneously.
BYD’s 5,000-person ADAS engineering investment is not a cost centre to be explained — it is the mechanism by which 150 million km per day of data translates into product differentiation. The data flywheel only generates value if there is an engineering organisation capable of converting raw data into improved algorithms at sufficient speed. The engineering headcount and the fleet scale are not independent investments; they are two halves of a single system.
For C-Suite Executives
BYD competes on three dimensions simultaneously — cost, velocity, and data — in a self-reinforcing flywheel that grows more powerful each year as the fleet expands. Any organisation entering a market where BYD competes must identify which moat it can meaningfully contest on a five-year horizon.
The cost moat is nearly impossible to replicate without decades of supply chain capital and institutional knowledge. The velocity moat is achievable with a cloud-native software organisation and a platform architecture that reduces dependency on external vendor coordination. The data moat requires either comparable fleet scale (years away for any new entrant) or a credible synthetic data strategy capable of substituting for real-world scenario diversity.
The most defensible positions against BYD are deep regional software differentiation, superior regulatory positioning in markets where BYD’s compliance timeline is less mature (particularly European GDPR, functional safety homologation timescales, and local cybersecurity regulation), and premium brand equity commanding margins BYD’s cost structure cannot yet serve at its highest engineering ambition.
Conclusion: The Architecture Behind the Numbers
BYD’s architecture is not accidental. It is the outcome of a consistent, three-decade philosophy: own the technology stack rather than assemble it from external suppliers. That choice required patient capital deployment across battery chemistry, power electronics, semiconductor fabrication, vehicle platform engineering, and now AI software — each layer building on the previous, each creating cost and capability advantages that compound over time.
The resulting competitive position — cost moat, velocity moat, data moat — is structurally difficult to contest on a five-year horizon precisely because the assets creating each moat were accumulated sequentially. You cannot buy thirty years of in-house IGBT manufacturing experience. You cannot instantly build a fleet data flywheel generating 150 million km per day. You cannot compress a twelve-month vehicle development cycle without first solving the software architecture, the platform standardisation, and the supplier integration that make it possible.
What BYD has built is not a technology company that makes cars, in the Elon Musk sense of that phrase. It is something more unusual: a manufacturing company that has successfully internalised the technology stack at every level of the value chain, and is now using that integration to deliver software-defined vehicle capability at a price point the rest of the industry cannot yet explain, let alone match.
Sources: BYD Dream Day 2024 · BYD Intelligent Strategy Conference February 2025 · NVIDIA DRIVE Orin specifications · Horizon Robotics public disclosures · 36Kr · DeepSeek integration announcements · BYD Annual Reports 2023–2024 · Kimi AI research · DeepSeek analysis · Qwen analysis · Grok analysis · Z-AI analysis · Perplexity analysis · Gemini analysis.
Note: Due to limited publicly verifiable data, certain technical sections of this analysis rely on logical deductions and industry assumptions.